JTE v14n2 - School Graduation Project in Robot Design: A Case Study of Team Learning Experiences and Outcomes
School Graduation Project in Robot Design: A Case Study of Team Learning Experiences and Outcomes
Igor M. Verner and Eyal Hershko
Contest SurveyIntroduction
The field of technology education is undergoing intensive curricular revision to accommodate the contents and practices required by the new Standards for Technological Literacy ( International Technology Education Association, 2000 ). The United States National Commission on the High School Senior Year released a report including recommendations for better preparation of secondary school graduates for tertiary education and professional careers ( Panel Calls for preK-16 Education, 2001 ). One of the proposed changes was to introduce a senior project, which would provide a student with options of internship, research, and community service. Grubb, Davis, Lum, Plihal and Morgaine (1991) characterized the senior project as a model for integrating vocational and academic education. Accordingly, the project carried out would include handson experience in vocational workshops, research, problem solving, and presenting findings. Many American schools and school districts have developed and released guides to graduation projects on their websites ( Goldsmith & Belasli, 2001 ). Similar programs are instituted in Great Britain and Israel. With this international effort to introduce projects into school curricula, there is a need to substantiate it by case studies of learning contents, processes, and assessment of specific projects as a source for case-based reasoning ( Kolodner, 1993 ) and conceptualization of educational approaches.
Many educators believe that robotics is a suitable subject for project- based education in high schools ( Beer, Chiel & Drushel, 1999 ; Wedeward & Bruder , in press). Learning through designing, building and operating robots can lead to the acquisition of knowledge and skills in high-tech electrical, mechanical, and computer engineering areas that are in high demand in industry. It can promote development of systems thinking, problem solving, self-study, and teamwork skills. Involvement of students in a robot contest can offer additional educational benefits including the following ( Verner, Ahlgren & Mendelssohn, 2000 ):
- The contest provides a focused, open-ended, interdisciplinary project that is a strong motivator of student creativity, self-directed learning, and research.
- Through cooperation and the development of professional relationships within and beyond the contest community, students develop and strengthen their teamwork and communication skills.
- Students become keen on designing robots and enjoy participating in the contest.
The above-mentioned potential advantages motivated the Israeli Ministry of Education to initiate a program of graduation projects in robotics and support participation of school teams in robotics contests. This paper presents a case study of learning and instruction in robot design projects performed in one Israeli high school (Mevohot E'ron High School), aiming to promote its further implementation and investigation of educational factors involved.
Graduation Project Framework
In Israel, the graduation project is an optional matriculation subject in the form of a self-directed assignment in science, technology, or humanities. Directions given by the Ministry of Education define its contents (a scientific subject studied through analysis, synthesis, and evaluation), emphases (selfdirected learning, science research methods, critical and creative thinking), and features (relation to high school discipline, a topic of student interest, a project including creative design and theoretical study). Projects are carried out individually or in groups of up to three students. The students start by preparing a project proposal and submitting it for approval, and finish by issuing the project report for external assessment. The report should document project activities and results and specify individual contributions of each student. Project assessment consists of:
- Demonstration of theoretical approach and deep understanding of the subject - 60 pts.
- Reports on experiments, observations, and interviews conducted by the student; originality and creativity - 10 pts.
- Relevant description, standard grammar, and clear explanation - 10 pts.
- Correct use of quotations, bibliography, numbering, illustrations and graphs - 10 pts.
- Appearance: easy to read, aesthetic - 10 pts.
The graduation project in technology is directed at integrating practical designing and building a product with research in technology and application of scientific methods. Many graduation projects prepared in the last five years relate to designing, constructing, and operating robots and have been carried out in connection with the Machine Control discipline ( Verner, Waks & Kolberg, 1997 ; Verner & Betzer, 2001 ).
A number of schools are implementing robotics projects inspired by the firefighting robot contest program ( Ahlgren & Mendelssohn, 1998 ). Since the 1998-1999 school year, high school students in Israel have participated in the international Trinity College Fire-Fighting Home Robot Contests (TCFFHRC) in Hartford, CT, USA, and in the local robot contests organized by the Israeli Ministry of Education. The Israeli delegation at the TCFFHRC included 24 students and 5 robots from five schools in 1999, 73 students and 8 robots from seven schools in 2000, 81 students and 10 robots from seven schools in 2001, and 112 students and 17 robots from nine schools in 2002.
The objective of our study is to examine learning through designing robots in the framework of school graduation projects. This paper presents the results of a case study of the fire-fighting robot projects developed in one of the schools in 1999-2002 with stress on the following research questions:
- Which subjects should teachers address as students design robotics systems, and how should they be integrated into the graduation projects?
- What are the learning objectives and activities at different stages of robot design?
- How should individual contributions and learning achievements in the team project be assessed?
These questions relate to the three principal aspects of the graduation project as an educational design experiment ( Brown, 1992 ): content knowledge, learning process, and authentic assessment. Question 1 focuses the study on theoretical subjects and practical skills learned in the fire-fighting robot project, and instructional methods to introduce them to high school students. Question 2 concerns instructional objectives and learning activities throughout the project. Experience in project guidance shows that different stages of robot design are related to distinct learning activities. Therefore, the study should examine each of the design stages. Question 3 arises from the need to assess the learning achievements of each student participating in the team project. It directs the study toward finding assessment criteria authentic for the teacher and the student. Answering the above questions through a case study was important for success of the fire-fighting robot projects in the Mevohot E'ron High School.
Fire-Fighting Robot Assignment
The TCFFHRC attracts a wide range of designers, including faculty and engineers, graduate and undergraduate students, as well as high school and junior high school pupils. The participants compete in one of several divisions (experts, senior, high school, junior). The contest assignment ( Ahlgren & Mendelssohn, 1998 ) is to develop a mobile robot that can navigate autonomously through a model house, find a lit candle placed at random in one of the rooms, and extinguish it. The maze includes four rooms and connecting hallways with black floors and white walls. White lines mark the rooms' thresholds. Each robot's score in the contest is the sum of the fastest two run times of the allowed three runs. These basic rules are extended by additional rules modified each year, which determine maze dimensions, robot characterisitics, and bonus and penalty factors, and which specify contest presentations and scoring. Detailed rules are released on the contest website: http://www.trincoll.edu/events/robot /
Fire-Fighting Project in Mevohot E'ron High School
A fire-fighting robot project at the Mevohot E'ron High School has been developed since 1998 by a technology teacher (Hershko) in connection with his graduate studies at the Technion. In 1999-2000, the Mevohot E'ron robot team consisted of 13 students, all males with diverse background levels in mathematics, physics, and technology. They were divided into five groups which dealt with structure, sensors, fire extinction, software, and management. The structure group designed and built the robot structure. The sensors group was responsible for the calibration of sensors and motors and the kinematics of straight and circular robot motion. The fire extinction group examined several possible solutions for extinguishing candles and chose a suitable propeller device, mounted it on the robot, and tested it. The software group dealt with maze navigation logic and programming robot movements. The management group coordinated the project schedule, logistics, reports, and presentations. The team participated in the TCFFHRC 2000 and shared places 12 to 16 (among 48).
As a result of careful evaluation of projects in the 1999-2000 school year, including the TCFFHRC 2000, several improvements were made in the 2000- 2001curriculum. The team consisted of 8 students, 6 males and 2 females, with diverse background levels. It was divided into two groups of equivalent amount of project work and responsibilities: structure and fire extinction (S&FE), and sensors and software (S&S). The S&FE group examined a number of variants of robot structure and fire extinction means through physical and mathematical modeling and CAD. The S&S group dealt with robot kinematics, application of shaft encoders for position control, and algorithms and software for maze navigation. The team developed another fire-fighting robot, which took seventh place (among 36) in the 2001 Trinity contest. Figure 1A shows the robot after finding the lit candle in the maze and ready to complete the task by extinguishing the candle.
The 2001-2002 project involved 25 students, all males of different background level and ethnic origin, divided into three teams who worked on three new and different fire-fighting robots. The first team built a 20_20_30 cm 3 robot with a caterpillar drive system for the expert division contest. The second team developed a tricycle robot of the same size and the third team designed a tiny fire fighter, 10_10_15 cm 3 (see Figure 1B), both for the high school division. The teams designed robots following the general outline developed in the 2001 project.
All 46 members of the Mevohot E'ron fire-fighting robot teams in 1999- 2002 were 12 th grade students who voluntarily chose and successfully completed school graduation projects in robotics. They formed the research population of the case study conducted in connection with the projects.
Figure 1 . The 2001 robot in the maze (left) and the 2002 Tiny Fire Fighter (right).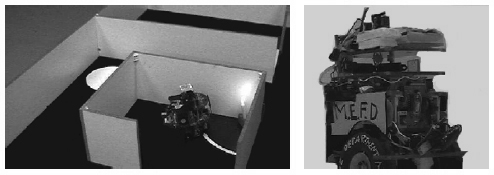
Project Outline
The project was conducted through a sequence of regular work meetings of the subject groups and the whole team. The meetings were in two stages: preparation and project work. Preparation meetings were conducted by an instructor twice each week. In these meetings the instructor introduced the process of building a fire-fighting robot. At these meetings the students put into practice subjects studied theoretically in the technology course. They operated DC motors, made drawings using CAD tools, calibrated sensors. and analyzed data on EXCEL spreadsheets. From our experience, these activities helped the students realize the value of the project and acquire the confidence to face its challenge.
The project work meetings were managed by students themselves and were directed purposefully toward the project goal. At these meetings the students recognized the range of tasks included in the fire-fighting robot design process and performed them. The main tasks are presented in Table 1.
When performing the robot design tasks specified in Table 1, they were divided between the structure and software groups of the team as follows: the structure group was responsible for M1-M3, I1, and P2; the software group carried out S1-S3, and I2; the rest of the tasks C1-C4, I3, and P1 were performed through collaboration between the groups.
Parallel to performing the tasks specified in Table 1, the students prepared graduation project reports. The structure and software groups were divided into subgroups of one to three students. Each of the subgroups documented its collective and individual activities in a separate portfolio and, at the end of the project, summarized the results of its theoretical and practical learning in the project report.
Table 1
Tasks and Products in the 2001 Project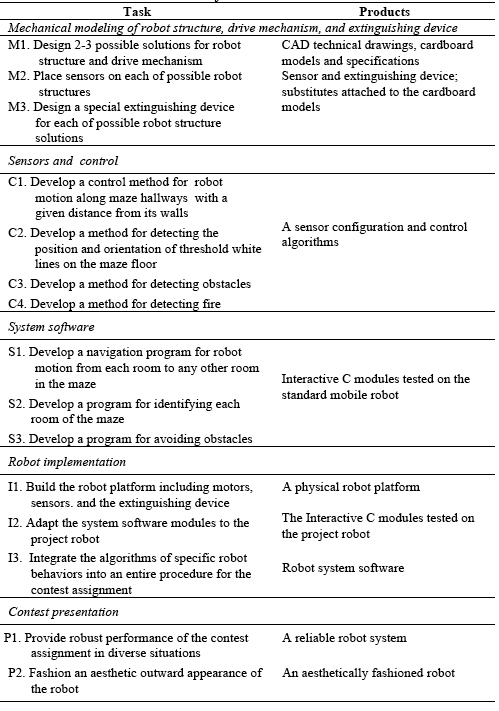
The report presented a range of experiences including the teamwork overview, the group collaborative work and its results, and the personal contributions of the students. In the teamwork overview the students described the structure and functions of the robot system and the principles behind its development. In relation to group work, the students discussed in detail the problems, methods, experiments, and practical activities in the subjects in which they were involved. When telling about their personal contributions, the students specified their involvement in robot subsystems and types of activities at each of the robot design stages. They also provided overall reflections about the project.
Research Methods
The educational study approached the fire-fighting robot program of the Mevohot E'ron High School both from the action research aspect, i.e.. a "selfreflective enquiry in order to improve the productivity, rationality, and justice" of graduation projects in robotics, as well as from the theoretical underlying factors in order to understand the "educational practices and the situations in which the practices were carried out" ( Kemmins, 1999 ). A faculty member (Verner) directed and shaped the study, and conducted the contest survey. A teacher (Hershko) guided the projects and conducted the study in his school. The field research data throughout the project were gathered from two main sources: the team portfolio and the teacher's logbook. The portfolio included a sequence of protocols of team meetings where specified tasks, experiences, solutions, and decisions were discussed. The teacher's logbook included results of quizzes, guidance notes, and observations of students' activities throughout the project. Graduation project reports provided the main source for summative assessment of learning achievements.
The study examined learning in the fire-fighting robot projects with focus on three aspects:
- Engineering knowledge and skills in designing robots and how they could be addressed in the high school graduation project.
- Learning by reflective practice directed at facing the challenges of the robot contest.
- Individual assessment of learning achievements in the team project.
Designing robots as engineering systems which combine mechanical, electrical, computer, and information technologies is studied in mechatronics ( Wikander, Torngren, & Hanson, 2001 ). When examining the various aspects of the fire-fighting robot design we relied on mechatronics texts ( Shetty & Kolk, 1997 ; Tomkinson & Horne, 1996 ), while a book (Jones, 1999) was a source of robotics experiments. Only subjects relevant to the project assignment, connected to the Machine Control curriculum ( Verner & Betzer, 2001 ), and adapted to high school learners were selected. Designing robots was taught throughout the project: at the preparatory stage by traditional experiments and at the project work stage through performing creative tasks or "design challenges" (Sadler, Coyle & Schwartz, 2000).
In teaching principles of the design process and guiding the fire-fighting robot design project, we applied the methodology of "total design" proposed by Pugh (1991) . The advantage of the Pugh model is that it fits the four principal features of the design process required by the International Technology Education Association (2000) :
- Flexibility - a sequence of stages combined with cyclical processes.
- Balance - an integration of mechanical, electronic, computer, and control components.
- Function - a purposeful process culminating in manufacture and sell.
- Proportion - a systematic consideration of various factors.
The six stages of the engineering design process in the Pugh model are market, specification, concept design, detail design, manufacture, and sell. To adapt the model to an instructional design process, we renamed some of the stages and added specifications presented in the first column of Table 2.
Table 2
Stages and Contents of the Design Process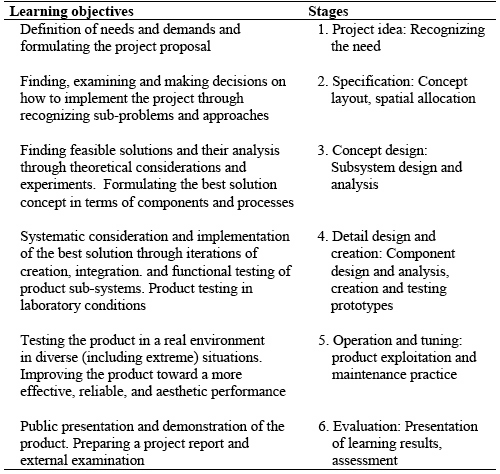
Learning activities in different robot projects, including fire-fighting robot projects, are intensively discussed in literature ( Beer, Chiel & Drushel, 1999 ; Wedeward & Bruder, in press ). In these studies the activities are considered in relation to the design process as a whole. Our study proposes and implements a different approach, namely, learning activities are specified with regard to the stages of the design process as shown in Table 2. This approach helps to plan and manage teamwork in the project.
Educational evaluation and assessment in this study is based on ethnographic observations of the teamwork, examination of learning achievements, and analysis of the TCFFHRC Survey ( Verner, Ahlgren & Mendelssohn, 2000 ). Educational surveys were carried out at the 1999, 2000 and 2001 fire-fighting contests at Trinity. They assessed the learning outcomes of contest-oriented curricula and attitudes of the participants to the program. The contestants were asked to fill out survey forms. The survey sought the following information: progress in disciplines gained by working on the contest project, forms of participation in the robot contest program, personal contribution to robot subsystems, motivation for participation in the contest project, and contribution of the contest to attitudes toward robotics and engineering.
Answers given by the Mevohot E'ron team members to the survey questions reflected their personal involvement and views on the project. The teacher explained the questions to the students before they filled the forms and got oral explanations of their answers after the survey.
Findings of the Research in Class
The analysis of the teacher's logbook and students' portfolios focused on notes related to the different stages of the design process (see Table 2). At the first stage of shaping the project idea, the central didactic objective was motivation, i.e., to provide the students with the incentive to meet the challenge of the project and put in the effort to bring it to completion. This was a timeconsuming process. It included such important features as watching and discussing a video of the prior robot contest, meeting with members of the previous year's team, and, of course, the personal enthusiasm and charisma of the teacher. Our study suggests that incentive was achieved, as indicated by the following student behavior:
Contributing time to self-directed extracurricular teamworkCuriosity and motivation in inquiring about project-related subjectsFrom the first work meeting, all of the students stayed extra hours and held additional meetings in the laboratory beyond the time formally assigned for project guidance.
Concentrating on solving project-related problemsDuring the project, the students managed informal consultations with their teachers of physics (in optics), biology (sensing biological systems), and chemistry (on chemical means of fire-fighting). They conducted extensive Web searches (robot navigation algorithms, sensors, drive mechanisms) and read recommended textbooks (design theory, mobile robots, and analog electronics).
Taking a personal initiative in project promotionFrom the responses of teachers and parents cited in the logbook, the students were deeply involved in the robotics problems and continually discussed them during the project. Of their own initiative the students developed and implemented in the project such robot design ideas as an artistic outward appearance, disposition of sensors, and an optimized kinematic scheme.
Feelings of empathy toward the robotAt the beginning of the project the team was advised to divide the assignment between two crews (structure and software). Later on, they divided the crews into sub-crews in order to examine alternative approaches to problems. Being involved in the organizational and economic aspects of the project and recognizing the need of funding the project, the students themselves approached potential sponsors (companies and a municipality).
The students gave the robot a name (Aurora) and gender (female), as reflected by its outward appearance. The minutes indicated that the students considered the robot as a co-partner. For example, one of the students wrote: "Today the robot did not like me."
Our study indicates high motivation and involvement of the students in the fire-fighting robot project. All 46 students who selected the project successfully completed it and prepared graduation reports. However, we should mention that the project attracted mainly male students. Only two of the participants were females (4.3 %).
In the second stage of the design process (specification), the didactic focus was on the development of technological systems thinking skills, as defined by the International Technology Education Association (2000 , 32-43). We found that learning achievements depend on the selected model of the design process. In 2000, the stages in the design process were performed as separate step-bystep tasks, concentrating on activities in mechanics and control. In 2001, we turned to a multifaceted iterative design approach ( Pugh, 1991 ). This change provided students with involvement in a wider range of aspects of the firefighting robot design.
At the concept design stage, the emphasis was on students' understanding and shaping of possible solutions and on collaborative decision-making of an optimal solution for each design problem. This was achieved through gathering technical data and making real-world experiments. Unlike professional designers, the students needed to build physical prototypes in order to focus their thoughts when examining solutions. The students mentioned that through building the prototypes they discovered new problems, of which they had been unaware at the previous design stage.
Detail Design and Creation (DDC) was the stage at which the students implemented the optimal solutions found in the earlier stages of design. This was performed through the coordinated work of the software and structure crews. The structure crew was concerned with building the robot. The students planned the robot assembling process, ordered relevant standard parts, and manufactured special parts for the project by carving, milling, drilling, and soldering. The software crew received the physical robot from the structure crew and wrote a computer program adapted to it. The central didactic issues at the DDC stage were 1) involving the students in a variety of activities, 2) promoting their technological creativity, and 3) planning collaborative work.
At the operational and tuning stage, when the robot was already built and its functions had been programmed, the team performed systematic tests to integrate the functions and execute the contest assignment in various real conditions. While in many other graduation projects the students are not required to test and improve their products systematically, in the fire-fighting robot project the incentive to achieve a complete product and succeed in the contest motivated the students to maximum effort at this stage. Intensive practice in testing and improving the robot led to the development of "the abilities to use and maintain technological products and systems," which are required from school graduates by the Standards ( International Technology Education Association, 2000 ). A negative finding detected by the study was that the teams did not assign sufficient time for this stage of the project and, as a result, were overworked before the contest.
Here we used the data from the contest survey for a summative evaluation and assessment of the project with focus on two survey questions. One of these questions asked each team member to estimate his or her progress resulting from participation in the project in the following 17 subjects: electronics, computer communication, microprocessors, assembly language, high-level language, motors and gears, mechanical design, robot kinematics, sensors and measurement, data analysis, physical field concepts, mathematical modeling, control systems, CAD tools, systems design, robot programming, and teamwork.
For each field the students evaluated their progress in theoretical and practical knowledge. In addition, the teacher estimated the progress of every student in the above fields. Teacher's estimates based on quizzes and logbook records took into account that the subjects were studied during the course at different levels of detail. Students' evaluations and teacher's estimates were compared.
The answers revealed that each of the students had made progress in the absolute majority of subjects in both theoretical and practical domains. The teacher reported a lack of students' progress in some subjects only in 14.3% of cases and the students themselves in 9.3% of cases.
Substantial progress was mainly achieved in programming, robot kinematics, sensors, data analysis, control, and teamwork. Especially high progress was reported in programming, robot kinematics, sensors, data analysis, control, and teamwork, i.e., in the subjects that were central to the project activities. Thus, the teacher's grades and students' self-assessment rates both claimed that the course achieved its goal of imparting interdisciplinary knowledge in both theoretical and practical domains. A similar effect of integrated learning through designing, building, and operating robots was achieved and analyzed in our former study ( Verner, Waks & Kolberg, 1997 ).
A high level of agreement was found between the students' self-evaluation and the teacher's assessment. In 50.9% of the cases, results of the two assessments were absolutely identical. In 32.1% of the cases the students' selfevaluation ratings were lower than the teacher's. A possible reason for this underestimation is the students' self-criticism and inexperience in assessment. In 17.0% of the cases, ratings of students were higher (overestimation). The overestimations related mainly to subjects that were new for the students and were studied at the basic level. The comparison also showed that the students evaluated their progress at different levels of objectivity.
In the second survey question, the team members were asked to describe their own practical activities with main robot components, namely, drive mechanism, mechanical structure, micro-controller, control circuits, sensor system, steering planning, system software, and the extinguishing device. For each component, they were asked to specify their involvement in various types of activities: Designing, Constructing, Testing, Implementing, and Installing. Students' responses (N=8) are presented in Table 3. Each of the rows informs about the involvement of a student in the robot development, while "+" denotes a specific activity with a robot component.
Table 3
Students' Involvement in the Robot DevelopmentIt is interesting to see clusters denoted by dashed rectangles in the table. They clearly indicate the two subgroups with different activities in the project: students 1-3 and students 4-7. This reflects the fact that teamwork in the project was managed in two subgroups, namely the structure and software groups, which divided functions and responsibilities.
Students 1-3 composed the structure subgroup. Four clusters present their exclusive contribution. The first cluster relates to the drive mechanism and robot structure, and shows involvement of each student in all five types of activities. As indicated by the second cluster, the structure subgroup dealt with the robot micro-controller, while the activities were only installing and testing. The third cluster is attributed to the steering planning subsystem, and the fourth one to the extinguishing device. Students 4-7 composed the software group. The only exclusive cluster for this subgroup is the system software, but its contribution to the robot is not less than that of the structure group. The "sensors" cluster indicates the common contribution of the two subgroups through involvement in all types of activities. The contribution of student 8 was in all of the subsystems. This student was the team leader.
Our study also detected the same effect of cluster-shaped division of project work for the three teams that developed fire-fighting robots in 2001-2002. Social interaction between students will be dealt with in another article.
Conclusions
The importance of the school graduation project as an integrator of vocational and academic education should be recognized. Our case study shows its possible curricular standing as an optional matriculation subject that involves the student in a purposeful intensive learning of design and technology. We believe that the option to work on a project should be available to any interested senior high school student.
Robotics is one possible subject for graduation projects. Since the 1998- 1999 school year, a number of schools in Israel have developed projects inspired by the challenge of fire-fighting robot design. They participated successfully in local contests organized by the Ministry of Education and in the international Trinity College Fire-Fighting Robot Contests. Our case study examined the firefighting robot projects developed in one of the schools during 1999-2002 and focused on the assessment of learning while working in the robot design teams. Results of the case study provide support to the following answers to the three research questions posed in the introduction.
- Among the major topics stated in the Standards for Technological Literacy ( International Technology Education Association, 2000 , 211-214), the robotics projects centered on those related to the sections on "Design" and "Abilities for a Technological World." When developing fire-fighting robots to fit contest requirements, the students went through all stages of the interdisciplinary design, as defined by Pugh, and built working prototypes of mechatronic systems (robots). They made significant progress in various engineering subjects and acquired technological and teamwork skills.
- While carrying out the project, the students went through the preparation and six design stages: project idea, specification, concept design, detail design and creation, operation and tuning, and evaluation. These stages are essentially different in relation to their subject matter and learning contents. Therefore, our case study included a detailed analysis of tasks, learning objectives, and typical student behavior at all stages of the fire-fighting robot design. We believe that this analysis was crucial for effective guidance and authentic assessment of the project.
- Individual assessment of contribution and learning achievements in the team project requires triangulation of ethnographic observations of the teamwork, examination of learning achievements, and an analysis of the students' reports. The assessment and self-assessment data in our case study were gathered from three main sources: a team portfolio, a teacher's logbook, and a contest survey. These gave a detailed picture of each student's involvement in the robot design, learning achievements, motivation and attitude toward technology.
The main conclusions of the article are valid only to the specific conditions of this case study. Further research of robot design projects in other schools has to be carried out before general conclusions can be reached.
References
Ahlgren, D., & Mendelssohn, J. (1998) . The Trinity College fire fighting home robot contest. ASEE Annual Conference , Seattle. Retrieved May 30, 2002, from http://www.asee.org/conferences/search/
Beer, R., Chiel, H., & Drushel R. (1999) . Using autonomous robotics to teach science and engineering. Communications of the ACM , 42(5), 85-92.
Brown, A. (1992) . Design experiments: Theoretical and methodological challenges in creating complex interventions in classroom settings. The Journal of the Learning Sciences , 2(2), 141-178.
Goldsmith, J., & Belasli, B. (2001) . Field expert's guide to the culminating project . Lake Washington School District. Retrieved May 30, 2002, from http://www.lkwash.wednet.edu/lwsd/pdf/ExpertsGuideCulminatingProject.pdf
Grubb, W.N., Davis, G., Lum, J., Plihal, J., & Morgaine, C. (1991) . The cunning hand, the cultured mind: Models for integrating vocational and academic education (MDS-141). Berkeley, CA: National Center for Research in Vocational Education, University of California.
International Technology Education Association. (2000) . Standards for technological literacy: Content for the study of technology . Reston, VA.
Kemmis., S. (1999) . Action research. In J. Keeves & G. Lakomski (Eds.), Issues in educational research . Oxford, GB: Elsevier Science.
Kolodner, J. (1993) . Case-based reasoning . San Mateo, CA: Morgan Kaufmann.
Panel calls for preK-16 education, American Teacher , December 2001/January 2002--Classnotes . Retrieved May 30, 2002, from American Federation of Teachers Web site http://www.aft.org/publications/american_teacher/dec01_jan02/classnotes.html
Pugh, S. (1991) . Total design. integrated methods for successful product engineering . Addison-Wesley.
Shetty, D., & Kolk, R. (1997) . Mechatronics system design . Boston: PWS.
Tomkinson, D., & Horne J. (1996) . Mechatronics engineering . NY: McGraw-Hill.
Verner, I., Ahlgren, D., & Mendelssohn, J. (2000) . Fire fighting robot competitions and learning outcomes: A quantitative assessment. ASEE Annual Conference , St. Louis. Retrieved May 30, 2002, from http://www.asee.org/conferences/search/
Verner, I., & Betzer, N. (2001) . Machine control - a design and technology discipline in Israel's senior high schools. International Journal of Technology and Design Education , 11(3), 263-272.
Verner, I., Waks, S., & Kolberg, E. (1997) . Upgrading technology towards the status of high school matriculation subject: A case study. Journal of Technology Education , 9(1), 64-75.
Wedeward, K., & Bruder, S. (in press) . Incorporating robotics into secondary education. In M. Jamshidi, (Ed.), Robotics, manufacturing, automation and control (2002 World Automation Congress), Vol. 14, Albuquerque, NM, USA: TSI Press.
Wikander, J., Torngren, M., and Hanson, M. (2001) . The science and education of mechatronics engineering. IEEE Robotics and Automation Magazine , June, 20-26.
Igor M. Verner ( ttrigor@techunix.technion.ac.il ) is a faculty member and Eyal Hershko ( air_shko@netvision.net.il ) is a doctoral student at Technion - Israel Institute of Technology, Haifa, Israel.